estimation geolayout geometry driven
Extended Kalman Filter vs. Error State Kalman Filter for Aircraft Attitude Estimation笔记
# EKF与ESKF的对比 ***“Engineers can solve exact problems using numerical approximations, or they can solve approximate problems exactly" - Fred Daum.*** 对 ......
ugui学习 - Text的align By Geometry
没勾选的时候 勾选后:会在原有排版的基础上,左边:文字矩形框与Text本身的矩形框左边对齐,上边:也是对齐 ......
kettle之添加geometry插件支持并使用
参考:https://blog.csdn.net/aganliang/article/details/104949538 为了能够处理geometry类型的数据,PDI需要安装pentaho-gis-plugins 该插件下载地址:https://github.com/atolcd/pentaho- ......
java mongo 插入geometry 多边形 线 点
import com.mongodb.client.MongoCollection;import com.mongodb.client.model.geojson.LineString;import com.mongodb.client.model.geojson.Point;import com. ......
5、Error-state kinematics for IMU-driven systems
IMU驱动系统的误差状态运动学 5.1 动机 我们希望使用Hamilton四元素表示空间方位或姿态,将具有偏置和噪声读数的加速度计和陀螺仪进行积分,实现惯性系统运动学的误差状态方程。 加速度计和陀螺仪的读数通常来自惯性测量单元(IMU)。将IMU读数积分会导致随时间漂移的惯性导航定位系统。避免漂移的 ......
[SIGMOD 2022]Lightweight and Accurate Cardinality Estimation by Neural Network Gaussian Process
# Lightweight and Accurate Cardinality Estimation by Neural Network Gaussian Process ## 总结 用无限宽度神经网络和高斯过程来等价贝叶斯过程,并利用主动学习提高精度,实现对某个SQL查询的cost估算 ## 动机 ......
Logistic Regression and its Maximum Likelihood Estimation
# 从 Linear Regression 到 Logistic Regression 给定二维样本数据集 $D = \left\{ (\vec{x}_{1}, y_{1}), (\vec{x}_{2}, y_{2}), \ldots, (\vec{x}_{n}, y_{n}) \right\}$, ......
KEDA — Kubernetes Based Event Driven Auto scaling(转载)
原文:https://itnext.io/keda-kubernetes-based-event-driven-autoscaling-48491c79ec74 Event-driven computing is hardly a new idea; people in the database w ......
DreamBooth Fine Tuning Text-to-Image Diffusion Models for Subject-Driven Generation
[TOC] > [Ruiz N., Li Y., Jampani V., Pritch Y., Rubinstein M. and Aberman K. DreamBooth: Fine tuning text-to-image diffusion models for subject-driven ......
从单页面应用到 Hypermedia-Driven Application Architecture
单页面应用程序(通过网络传输JSON)是在单个网页上运行的应用程序。在加载一个HTML页面和一些JavaScript后,它们依靠Ajax(“异步JavaScript和XML”)请求在服务器和客户端之间传递JSON数据对象,通过JavaScript和文档对象模型(DOM)API来更新HTML页面,而无 ......
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator-翻译
摘要:本文介绍了一种单目视觉惯性系统(VINS),用于在各种环境中进行状态估计。单目相机和低成本惯性测量单元(IMU)构成了六自由度状态估计的最小传感器套件。我们的算法通过有界滑动窗口迭代地优化视觉和惯性测量,以实现精确的状态估计。视觉结构是通过滑动窗口中的关键帧来维护的,而惯性度量则是通过关键帧之 ......
Hypermedia-Driven Application Architecture 介绍
超媒体驱动应用(Hypermedia-Driven Application Architecture,简称 HDA)架构是一种新的构建网络应用的方法。它将传统的多页面应用程序(MPA)的简单性和灵活性与单页面应用程序(SPA)的更好用户体验相结合。 HDA 架构通过扩展现有的HTML基础设施,允许超 ......
Games101-Cp4-Geometry
###几何表示方法 - 隐式表达 对应通过隐函数表示点的相对位置,而不是空间的具体位置。具体有:代数公式、水平集、分形/自相似(fractals)、CSG(constructive solid geometry):通过简单几何体的布尔运算获得复杂的几何体、距离函数:指的是到几何体点的最小距离,当两个 ......
What is API Gateway Notes, API Driven Dev Notes
API Driven Development What is API Driven Development? API Driven Development is a process that allows developers to focus on API design before writin ......
Three.js系列-报错export ‘Geometry‘ (imported as ‘THREE‘) was not found in ‘three‘
## 今天遇到报错export 'Geometry' (imported as 'THREE') was not found in 'three' ``` port 'Geometry' (imported as 'THREE') was not found in 'three' (possible ......
java.lang.IllegalArgumentException: geometries must not contain null elements
MultiPolygon multipolygon = geometryFactory.createMultiPolygon(polygons)//报错 polygons里包含空元素?? 参考:http://javadox.com/com.vividsolutions/jts/1.13/com/vi ......
Density estimation using Real NVP
[TOC] > [Dinh L, Sohl-Dickstein J. and Bengio S. Density estimation using real nvp. ICLR, 2017.](http://arxiv.org/abs/1605.08803) ## 概 一种可逆的 flow, 感觉很 ......
使用 TensorFlow 自动微分和神经网络功能估算线性回归的参数(Estimate parameters for linear regression using automatic differentiation or neural network functions of TensorFlow)
大多数的深度学习框架至少都会具备以下功能: (1)张量运算 (2)自动微分 (3)神经网络及各种神经层 TensorFlow 框架亦是如此。在《深度学习全书 公式+推导+代码+TensorFlow全程案例》—— 洪锦魁主编 清华大学出版社 ISBN 978-7-302-61030-4 这本书第3章 ......
Feb 2023-Replay Memory as An Empirical MDP: Combining Conservative Estimation with Experience Replay
将 replay memory视为经验 replay memory MDP (RM-MDP),并通过求解该经验MDP获得一个保守估计。MDP是非平稳的,可以通过采样有效地更新。基于保守估计设计了价值和策略正则化器,并将其与经验回放(CEER)相结合来正则化DQN的学习。 ......
Java后端Geometry 圈层合并
public static void main(String[] args) throws Exception { Geometry geo1 = fromWKB("十六进制范围字符串"); Geometry geo2 = fromWKB("十六进制范围字符串"); Geometry geo = g ......
Controllable Guarantees for Fair Outcomes via Contrastive Information Estimation
Gupta U., Ferber A. M., Dilkina B. and Steeg G. V. Controllable guarantees for fair outcomes via contrastive information estimation. AAAI, 2021. 概 本文提 ......
Three.js教程:Face3对象定义Geometry的三角形面
推荐:将NSDT场景编辑器加入你的3D工具链 其他系列工具:NSDT简石数字孪生 Face3对象定义Geometry的三角形面 几何体Geometry的三角面属性geometry.faces和缓冲类型几何体BufferGeometry顶点索引属性BufferGeometry.index类似都是顶点位 ......
Three.js教程:设置Geometry顶点位置、顶点颜色数据
推荐:将NSDT场景编辑器加入你的3D工具链 其他系列工具:NSDT简石数字孪生 前面几篇文章通过缓冲类型几何体BufferGeometry给大家讲解了顶点位置、颜色、法向量、索引数据,本节课给大家引入一个新的threejs几何体APIGeometry。几何体Geometry和缓冲类型几何体Buff ......
Three.js教程:Face3对象定义Geometry的三角形面
推荐:将NSDT场景编辑器加入你的3D工具链 其他系列工具:NSDT简石数字孪生 Face3对象定义Geometry的三角形面 几何体Geometry的三角面属性geometry.faces和缓冲类型几何体BufferGeometry顶点索引属性BufferGeometry.index类似都是顶点位 ......
JTS空间坐标Geometry使用
Geomtery子类图 创建Geometry GeometryFactory geometryFactory = JTSFactoryFinder.getGeometryFactory(); // 点 Coordinate coord = new Coordinate(1, 1); Point po ......
2020CVPR_Zero-Reference Deep Curve Estimation for Low-Light Image Enhancement
1. motivation 收到图像编辑软件的启发 2. Contribution (1)无监督 (2)设计图像高阶曲线适应适合像素级映射,通过迭代自身 (3)设计了四个无参考损失函数 3. Network 3.1 DCE-Net DCE-Net: 是由6个Conv2D(3x3)+ relu,分别输 ......
[State Estimation] 2.2.8 Passing a Gaussian throught a Nonlinearity
将高斯 PDF 通过非线性函数,结果使用高斯变换表示。 这涉及到 linearization 。 问题的定义是有 $\mathbf{x}$ 符合高斯噪声(即已知 $p(\mathbf{x})$),有变换 $g(\cdot): \mathbf{x} \to \mathbf{y}$(即已知 $p(\ma ......
[State Estimation] 4.2.8 Bayes Filter
PF 理解不深,若干年前 coursera 上某门课程做了填空式编程题,仅此而已。 重点应该有二: weight 定义方法; Resampling 方法,减少例子数量,维持系统计算量。 Madow Resampling 图示如下,参考 https://youtu.be/DhxRxG5bSrg?t=1 ......
[State Estimation] 4.2.3 Extended Kalman Filter
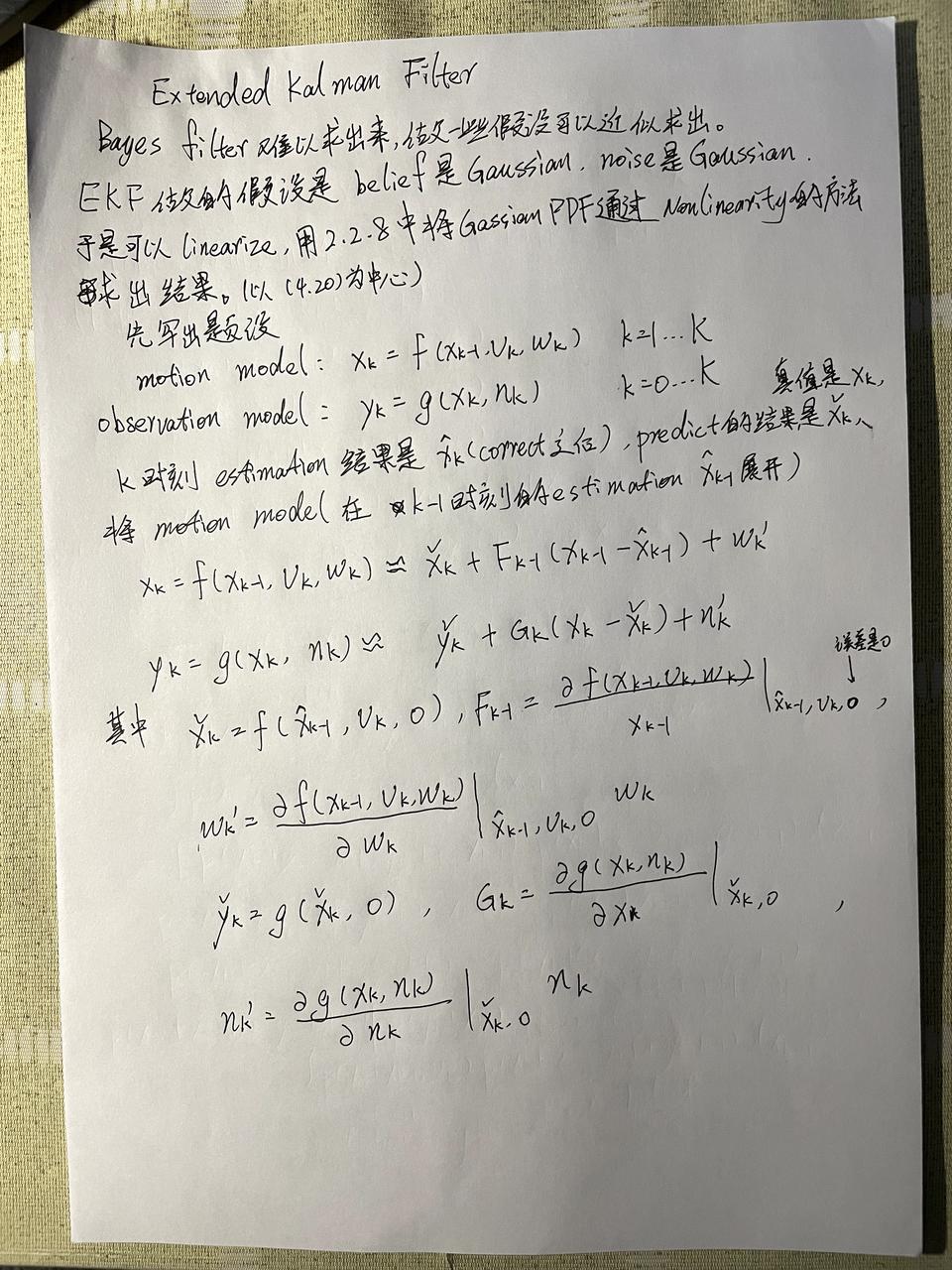  ![](https://img2023.cnblogs.com/blog/1104994/202304/1104... ......