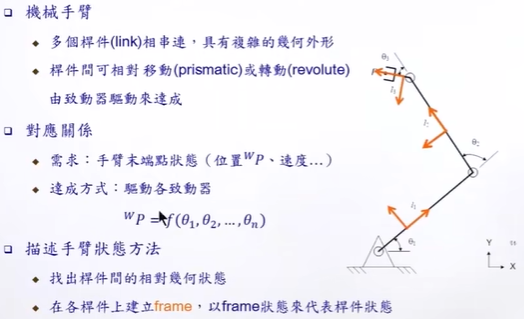
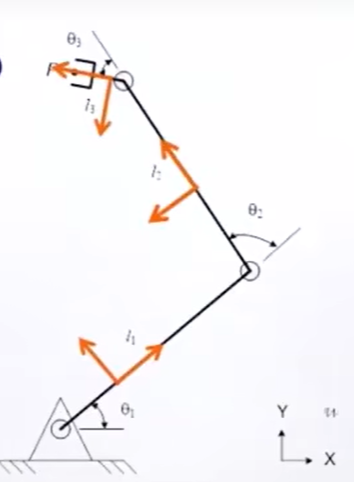
正算 已知各个关机的角度,θ1,θ2,θ3,以及臂长,求末端位置。 本栏目推荐文章OSPF理论基础固态硬盘与机械硬盘有什么区别?运动控制理论(2)——实践例子POT超阈值模型和极值理论EVT分析|附代码数据运动控制理论(二)——机械臂控制深度学习之机器学习理论数据库基本理论知识哲学:想和做(“理论”必须作用域“实现”)睿尔曼超轻量仿人机械臂--西门子PLC与机械臂通信物体抓取通过手柄实现控制机械臂运动