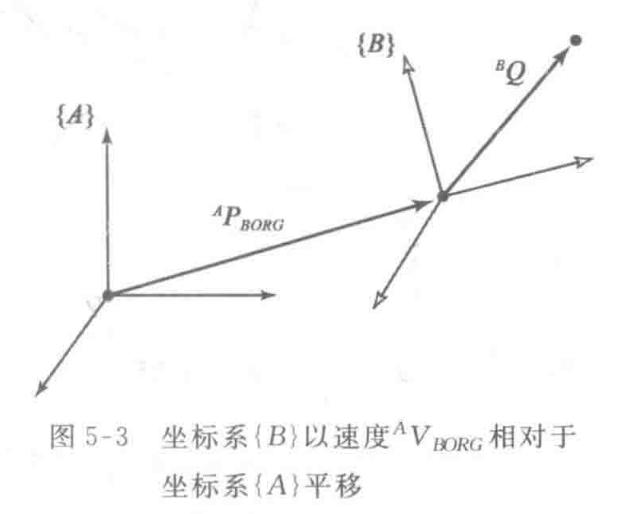
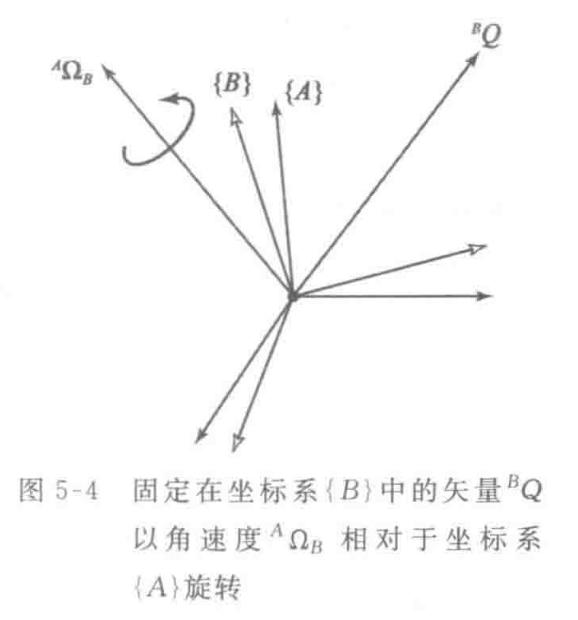
目录第五章 雅可比:速度和静力5.1 刚体的线速度和角速度5.5 机器人连杆运动 第五章 雅可比:速度和静力 5.1 刚体的线速度和角速度 \(V_{BORG}\)是坐标系B在A坐标系下的速度,\(^BV_Q\)是B坐标系下Q的速度,\(^A\Omega\)表示从坐标系A观测时,矢量Q的运动是绕着\(^A\Omega\)旋转的 5.5 机器人连杆运动 本栏目推荐文章实验七:Spark机器学习库Mtlib编程实践机器视觉 - YoloV8 命令行安装机器学习-概率图模型系列-隐含马尔科夫模型-33数据科学 机器学习 (训练营)简易机器学习笔记(十一)opencv 简易使用-人脸识别、分类任务文心一言 VS 讯飞星火 VS chatgpt (177)-- 算法导论13.3 6题【机器学习】逻辑回归【机器学习】多元线性回归深度学习之机器学习理论文心一言 VS 讯飞星火 VS chatgpt (176)-- 算法导论13.3 5题