Cordic算法
CORDIC 算法是坐标旋转数字计算的缩写,它最初用于三角函数的坐标变换,经过一定的推广后也可用于计算线形函数和双曲线函数(开平方根)。CORDIC算法只由移位操作和加减操作,因此,非常适合于在硬件使用。
一、圆周系统
圆周系统下有两种模式,旋转模式和向量模式
1.1 旋转模式
1.1.1 原理
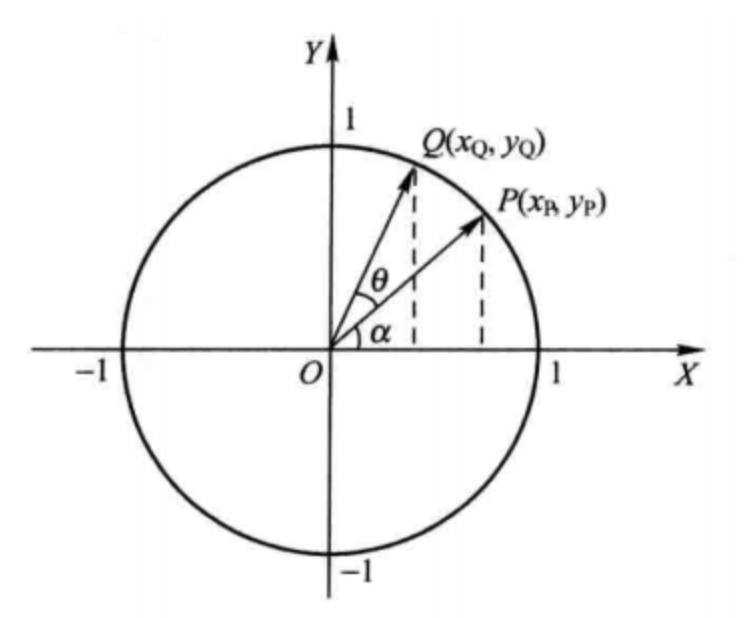
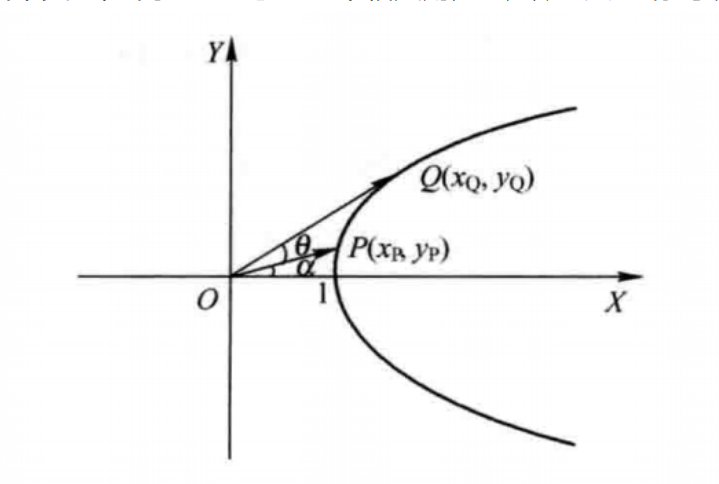
图1.1是一个单位圆。对于P/Q两点坐标为式(1.1) (1.2)
$$
\begin{cases}
x_P=cos\alpha\
y_P=sin\alpha\
\end{cases}
\tag{1.1}
$$
$$
\begin{cases}
x_Q=cos(\alpha+\theta)=cos\alpha cos\theta-sin\alpha sin\theta\
y_Q=sin(\alpha+\theta)=sin\alpha cos\theta+sin\theta cos\alpha\
\end{cases}
\tag{1.2}
$$
对于式(1.2),提出cosθ,并带入式(1.1)得到式(1.3)
$$
\begin{cases}
x_Q=cos\theta(x_P-y_Ptan\theta) \
y_Q=cos\theta(y_P+x_Ptan\theta) \
\end{cases}
\tag{1.3}
$$
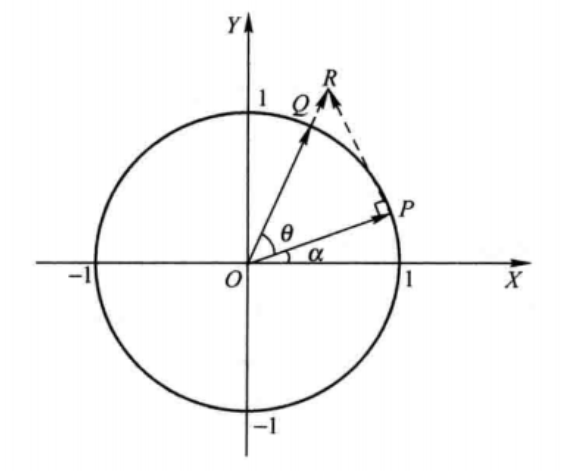
由伪旋转图1.2可知,OP逆时针旋转θ°之后,理应到达OQ位置,根据三角函数关系,可得OQ的长度(模)刚好是OR的cosθ倍,相位一致**。因此R的坐标如式(1.4)。我们称OR是伪旋转,并先计算伪旋转,再补偿模值。
对于伪旋转的运算是算法的核心所在,首先分解成一次次的旋转迭代,先将θ分解如式(1.5)
$$
\theta=\sum_{i=0}^\infty\theta_i
\tag{1.5}
$$
然后把坐标计算分解,第i+1次的计算公式(1.6)
$$
\begin{cases}
x_{i+1}=x_i-y_itan\theta_i \
y_{i+1}=y_i+x_itan\theta_i \
\end{cases}
\tag{1.6}
$$
由于tanθ并不是一个容易得到的值,因此把tanθ替换,如式(1.7).这里又引入了一个z,是干什么用的呢?要理解z,首先理解旋转迭代的过程,因为旋转迭代是可以看成围绕最终目标(这里是OQ)的来回振荡,如果这次转到目标上方(也就是相位超出目标),下次就要往下转(顺时针),反之同理。因此需要记录本次旋转后与目标的距离和相位情况,而这就是z的作用。而d决定旋转方向,如果zi是负数,说明相位落后,要增加相位,因此取负然后负负得正,使zi+1变大,相反,如果zi是正数,说明相位超前,需要相位回来一点,因此取负让zi+1等于zi减去本次微旋转角度θi。
$$
\begin{gather}
tan\theta_i=d_i2^{-i}
\tag{1.7}\
z_{i+1}=z_i-\theta_i=z_i-tan{-1}(d_i2)
\tag{1.8}\
d_i=
\begin{cases}
+1&z_i\ge0 \
-1&z_i< 0 \
\end{cases}
\tag{1.9}\
\end{gather}
$$
伪旋转迭代完成后,需要进行补偿(也可以在旋转开始前补偿)。令补偿因子为K,则实际旋转迭代方程如(1.10),由于x、y的次数相同,因此可以把补偿因子提出,结合式(1.7)累乘得到式(1.11)和式(1.12)。
$$
\begin{cases}
x_{i+1}=K_i(x_i-y_id_i2^{-i}) \
y_{i+1}=K_i(y_i+x_id_i2^{-i}) \
\end{cases}
\tag{1.10}
$$
$$
\begin{gather}
K_i=cos\theta_i=\frac{1}{\sqrt{12+{(2{-i}})^2}}
\tag{1.11}\
K=\prod_0^\infty K_i
\tag{1.12}\
\end{gather}
$$
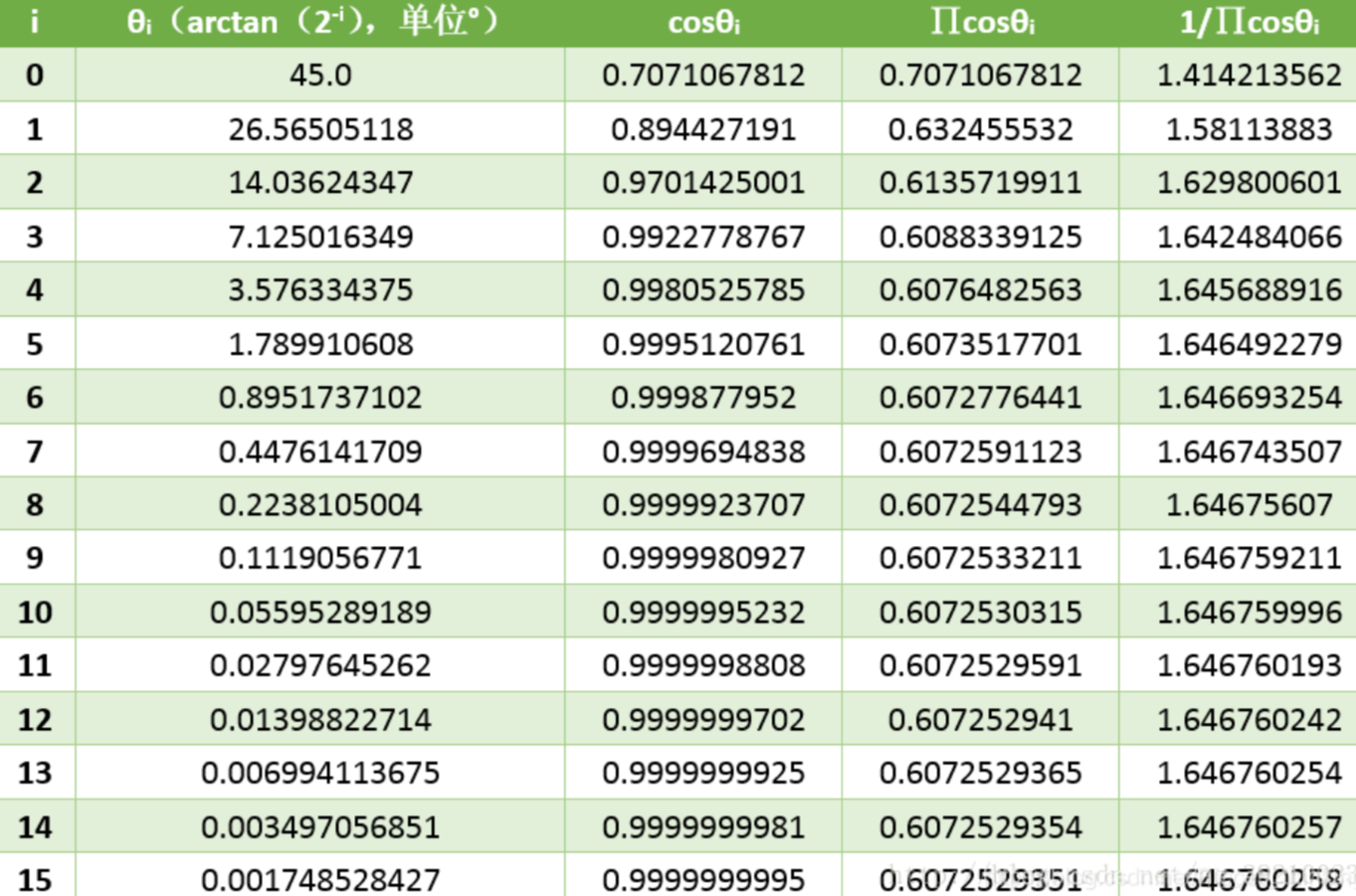
由于cosθi的值是固定的,如图1.3,因此可以提前把K算出来,取0.607252935.
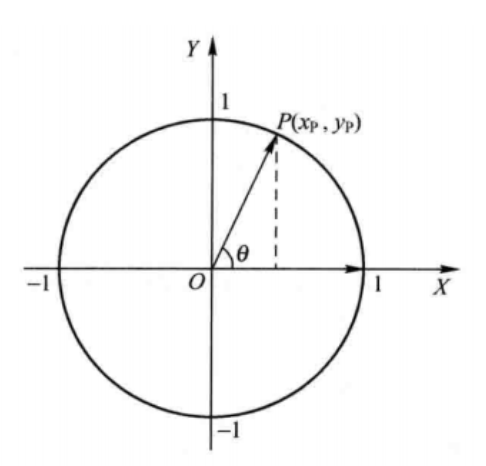
旋转模式可以计算三角函数sin和cos,可以让z0为待求角度θ,y0为0,x0为K,输出为
$$
\begin{gather}
\begin{cases}
x_n=cos\theta \
y_n=sin\theta \
z_n=0
\end{cases}
\tag{1.14}
\end{gather}
$$
1.2 向量模式
1.2.1 原理
向量模式与旋转模式基本原理相似,都是在单位圆做旋转。区别在于向量模式求得是模长和角度,本质是直角坐标向极坐标的转换。图1.4即为向量模式,只有一个点P,经过n次迭代,最终使OP顺时针旋转到x轴正半轴上,从而得到角度。
1.2.2 应用
- 求复数的模和相位
令x0,y0为分别为复数x+yi的实部和虚部,并且对xn输出模值校正(乘K),结果x'n输出模值,z0输出相位。实际操作时也可把x0和y0先校正。
-
求反正切
令x=1,y0为角度,则z0输出y0的反正切值。由于不涉及幅度,因此不需要校正。
二、双曲系统
2.1 旋转模式
2.1.1 原理
在双曲系统,点的坐标落在双曲线正半轴上,分析方法与圆周系统一样,只不过方程和坐标略有不同。
$$
\begin{cases}
x_Q=cosh(\alpha+\theta)=cosh\alpha cosh\theta+sinh\alpha sinh\theta\
y_Q=sinh(\alpha+\theta)=sinh\alpha cosh\theta+sinh\theta cosh\alpha\
\end{cases}
\tag{2.2}
$$
将式(2.1)带入式(2.2),并提出coshθ,得到式(2.3)
$$
\begin{cases}
x_Q=cosh\theta(x_P+y_Ptanh\theta) \
y_Q=cosh\theta(y_P+x_Ptanh\theta) \
\end{cases}
\tag{2.3}
$$
然后就是熟悉的伪旋转分解:
$$
\begin{cases}
x_{i+1}=x_i+y_id_i2^{-i} \
y_{i+1}=y_i+x_id_i2^{-i} \
z_{i+1}=z_i-\theta_i=z_i-tanh{-1}(d_i2)\
d_i=
\begin{cases}
+1&z_i\ge0 \
-1&z_i< 0 \
\end{cases}
\end{cases}
\tag{2.4}
$$
当然,由于是cosh而不是cos,因此迭代过程略有不同。首先因为分母不可以为零,因此跳过第一次迭代,当迭代到4、13、40等满足i=3k+1形式,必须重复迭代一次,即1,2,3,4,4,5... 另外模补偿因子也有不同,见式(2.5),K≈1.20749706
$$
\begin{gather}
K_i=cosh\theta_i=\frac{1}{\sqrt{12-{(2{-i}})^2}}\
K=\prod_1^\infty K_i
\end{gather}
\tag{2.5}\
$$
由于i=0取不到,因此从1开始迭代,最终迭代结果如式(2.6)
$$
\begin{gather}
\begin{cases}
x_n=\frac{1}{K}(x_1coshz_1-y_1sinhz_1) \
y_n=\frac{1}{K}(y_1coshz_1+x_1sinhz_1) \
z_n=0
\end{cases}
\end{gather}
\tag{2.6}
$$
2.1.2 应用
旋转模式下可以求双曲余弦函数和双曲正弦函数,令x1=1/K,y1=0,z1=θ,得到
$$
\begin{gather}
\begin{cases}
x_n=cosh\theta\
y_n=sinh\theta\
z_n=0
\end{cases}
\tag{2.7}
\end{gather}
$$
2.2 向量模式
2.2.1 原理
在双曲系统,点的坐标落在双曲线正半轴上,分析方法与圆周系统一样,只不过方程和坐标略有不同,跳过第一次迭代。迭代分析过程表达式(2.8)
$$
\begin{cases}
x_{i+1}=x_i+y_id_i2^{-i} \
y_{i+1}=y_i+x_id_i2^{-i} \
z_{i+1}=z_i-\theta_i=z_i-tanh{-1}(d_i2)\
d_i=
\begin{cases}
+1&y_i\lt0 \
-1&y_i\ge0 \
\end{cases}
\end{cases}
\tag{2.8}
$$
直接给出结果式(2.9)
$$
\begin{gather}
\begin{cases}
x_n=\frac{1}{K}\sqrt{x_12-y_12} \
y_n=0 \
z_n=z_1+tanh^{-1}(y_1/x_1)
\end{cases}
\tag{2.9}
\end{gather}
$$
2.2.2 应用
可以求开方和对数,令x1=θ+1,y1=θ-1,z1=0
$$
\begin{gather}
\begin{cases}
x_n=\frac{2}{K}\sqrt{\theta} \
y_n=0 \
z_n=z_1+tanh^{-1}(\frac{\theta-1}{\theta+1})=\frac{1}{2}\ln\theta
\end{cases}
\tag{2.10}
\end{gather}
$$