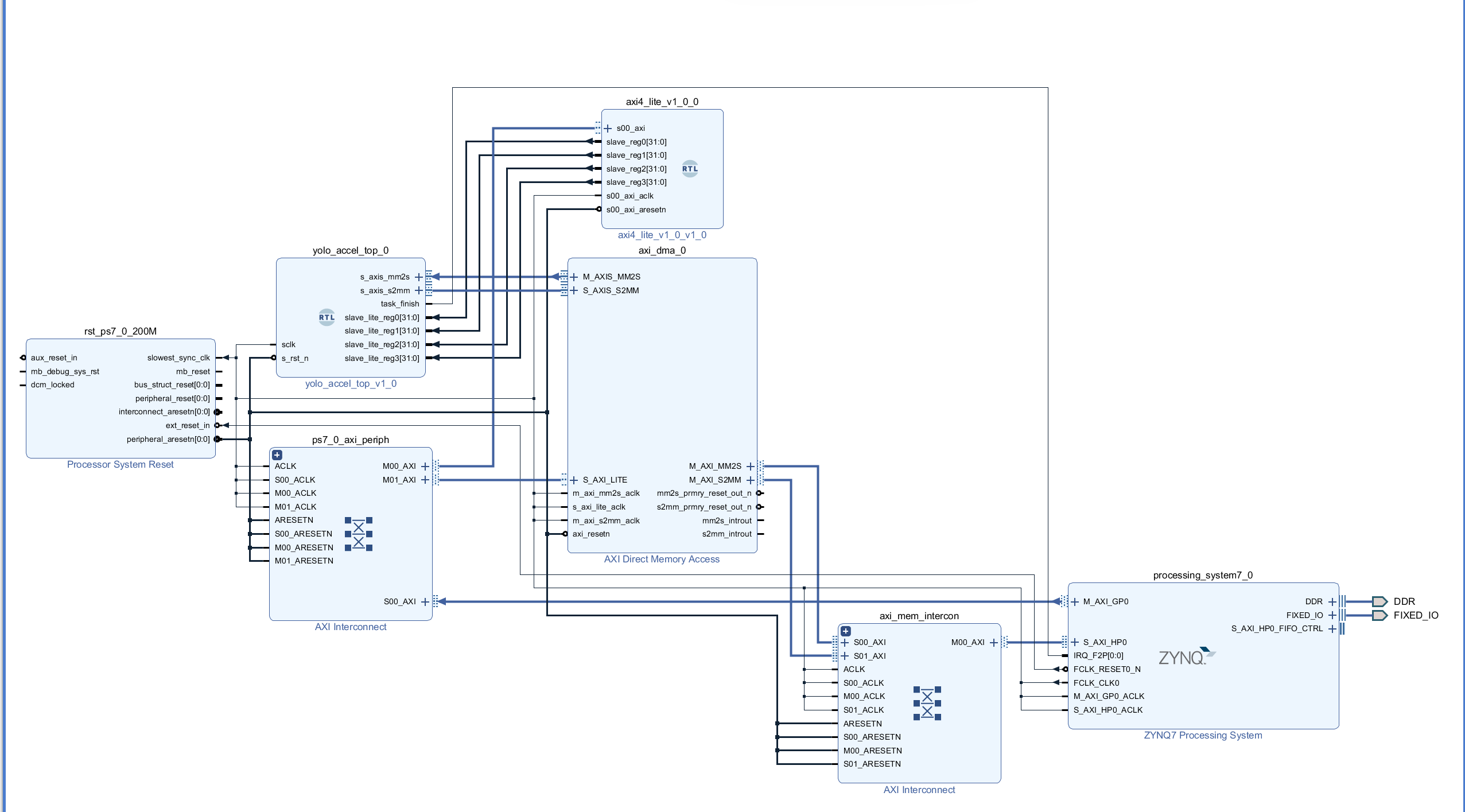
描述:实现了一个卷积神经网络加速器,成功搭载
Yolov3tiny。配合摄像头采集+显示器回显环路,构建了一个高性能实时目标识别与检测系统。
实现方式:
Verilog实现卷积加速器的设计,
C语言实现Zynq PS端的开发,
Python实现神经网络的搭建与量化
开发工具套件:
Vivado2019.2,
Vitis2019.2,
Python,
Pytorch
验证平台:Xilinx Zynq xc7z100
文件目录:
src文件夹是所有代码文件
sim文件夹是testbench文件
vivado_prj文件夹是卷积加速器硬件Vivado工程